Ako vypočítate koordinované pohyby dvoch robotických ramien, ktoré majú presne viesť vysoko flexibilný nástroj? Za týmto účelom výskumníci z ETH Zürich integrovali všetky aspekty optimalizačných výpočtov do algoritmu. S rezačkou horúceho drôtu sa, okrem iného, vyvíjajú stavebné bloky pre budovu bez malty.
Novonarodené dieťa pohybuje rukami a rukami zväčša náhodne. Musí sa naučiť, ako ich krok za krokom koordinovať. Trvá to roky praxe, kým sa dosiahnu jemne vyladené pohyby huslistu alebo kaligrafa. Takže neprekvapuje, že predpovede optimálnych pohybov dvoch robotických ramien, ktoré majú viesť nástroj, presne predstavujú mimoriadne náročné optimalizačné úlohy. Zložitosť sa masívne zvyšuje, ak samotný nástroj nie je pevný, ale pružný vo všetkých smeroch a ohýba sa rôzne v závislosti od jeho polohy a pohybu.
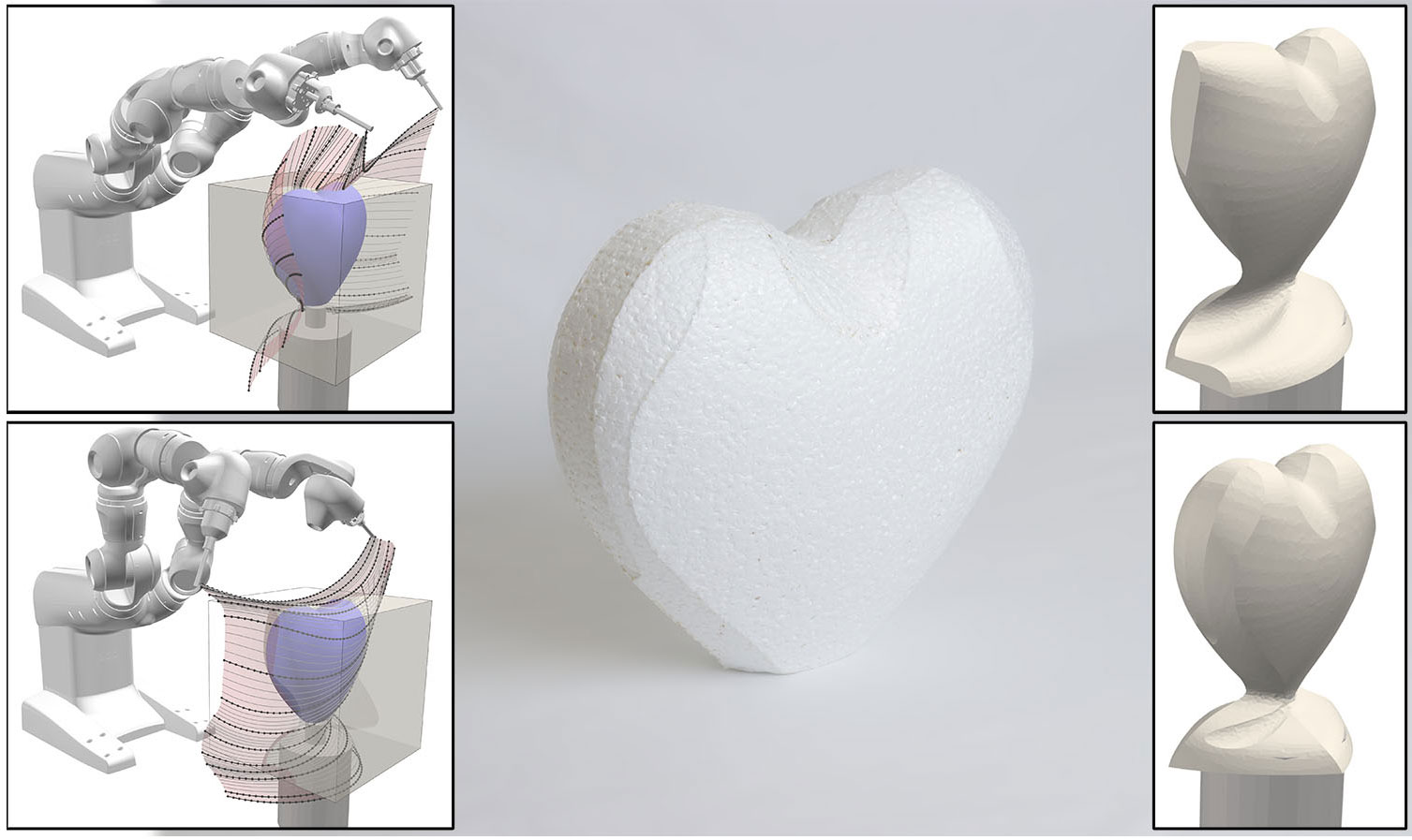
Simon Dünser z výskumnej skupiny Steliana Corosa z Inštitútu pre inteligentné interaktívne systémy spolupracoval s ďalšími výskumníkmi na vývoji robota na rezanie horúcim drôtom, ktorý je možné pri práci flexibilne ohýbať. Vďaka tomu môže vytvárať oveľa zložitejšie tvary v oveľa menšom počte výrezov ako predchádzajúce systémy. Ich elektricky vyhrievaný drôt je tuhý, a preto môže z taviteľných plastov vystrihnúť iba takzvané riadené povrchy, ktoré v každom bode obsahujú priamku.
Vyrezávajte dizajnové fasády
Naproti tomu RoboCut vyvinutý počítačovými vedcami z ETH sa neobmedzuje iba na roviny, valce, kužele alebo sedlové povrchy, ale je tiež schopný napríklad vytvárať vrúbky v plastovom bloku. Najväčšou výhodou však je, že cielené ohýbanie drôtu znamená, že je potrebných oveľa menej rezov, ako keby bolo možné cieľový tvar priblížiť iba pravidelnými povrchmi. Napríklad figúru sediaceho králika je možné pomocou ohýbateľného drôtu vytvarovať z polystyrénového bloku iba v desiatich rezoch s presnosťou podobnou rezbárstvu. Už po dvoch rezoch sú zreteľne viditeľné obrysy zajaca.
Okrem zásadného vylepšenia tradičnej metódy horúceho drôtu projekt RobotCut sleduje aj ďalšie špecifické aplikačné ciele. Táto technológia sa v budúcnosti bude využívať napríklad v architektúre na výrobu jednotlivých foriem na betónové diely z polystyrénu. Napríklad fasády by sa mohli navrhovať rozmanitejšie alebo by sa mohli vyvíjať nové typy stavebných blokových systémov.
Tri optimalizácie súčasne
Projekt sa zameral na vedecké výzvy. Špeciálnou vecou RoboCutu sú komplexné optimalizačné výpočty. Sú potrebné na nájdenie čo najefektívnejších dráh nástroja a zároveň na čo najpresnejšie roztavenie požadovaného tvaru z polystyrénového bloku.
Aby bolo možné drôtom riadeným spôsobom pohybovať, bol pripojený k dvojramennému robotu Yumi od spoločnosti ABB. Najskôr bolo treba vypočítať, ako drôt reaguje na pohyby robotických ramien. Polohy, ktoré vedú k nestabilným pozíciám drôtov alebo kde existuje riziko zlomenia drôtu, sa určili pomocou simulácií a potom sa vylúčili.
Vedci z ETH potom boli schopní na tomto základe nastaviť skutočnú optimalizáciu. To muselo brať do úvahy tri vzájomne súvisiace aspekty súčasne. Na fyzickej úrovni bolo potrebné predpovedať riadené ohýbanie a pohyb drôtu, aby bolo možné vykonať požadované rezy. V oblasti tvaru bolo treba určiť postupnosť rezov, ktoré čo najpresnejšie privedú povrch k cieľovému tvaru v čo najmenších krokoch. A nakoniec nesmie dochádzať ku kolíziám s časťami robota a jeho okoliu, ako aj k neúmyselným rezom.
Simon Dünser z ETH Zürich patrí k prvým vedcom, ktorým sa podarilo integrovať všetky parametre tejto zložitej úlohy do globálneho optimalizačného algoritmu. Na to navrhli štruktúrovanú metodiku. Toto je založené na prevažujúcom objektíve, ktorý by mal drôt rezať vždy čo najbližšie k povrchu cieľového objektu. Všetkým ostatným obmedzeniam boli potom priradené náklady a tieto boli optimalizované ako celkom.
Bez ďalších trikov však také výpočty vždy spadajú späť do miestnych miním, ktoré vedú k nezmyselnému konečnému výsledku. Aby sa tomu zabránilo, v prvom kroku Simon Dünser takpovediac vyžehlil nákladovú funkciu a začal výpočet rezom, ktorý bol len zhruba prispôsobený tvaru terča. Potom sa simulácia rezania postupne aproximovala smerom k cieľovému tvaru, až kým sa nedosiahla požadovaná presnosť.
Metodika s rôznorodým potenciálom
Metóda vyvinutá Simonom Dünserom z ETH sa neobmedzuje iba na rezanie horúcim drôtom. Z toho by v budúcnosti mohlo profitovať aj plánovanie dráh nástrojov z iných techník rezania a frézovania. Najmä keď sa musia generovať zložité, nerotačne symetrické tvary, metóda otvára oveľa väčší priestor pre simulácie.
Pomocou tejto technológie možno elektricky vodivé materiály rezať s vysokou presnosťou pomocou iskrovej ablácie. V budúcnosti by sa tu mohli použiť ohybné elektródové drôty. Týmto spôsobom – obdobne ako pri rezaní plastov horúcim drôtom – je možné vykonať komplikovanejšie a teda efektívnejšie rezy ako pri súčasných pevných drôtoch.
Konkrétna aplikácia RoboCutu sa plánuje spolu s výskumnou skupinou z EPF Lausanne. S pomocou veľkej verzie robota na rezanie horúcim drôtom sa majú vyvinúť systematické stavebné bloky pre stavebné konštrukcie bez malty a upevňovacej technológie. Samotné prvky musia stabilne držať pohromade. Neskôr sa robot použije aj na rezanie foriem z polystyrénu, pomocou ktorých sa rôzne stavebné bloky nalievajú do betónu. Šikovná rezačka plastov tiež vytvára technológiu betónovej konštrukcie zajtrajška.
Zdroj: https://ethz.ch, zverejnené: 8.9.2020, autor: rpa

